
Google Scholar|Bilibili|YouTube
Email: hetolinlht[at]gmail[dot]com
I am a senior researcher at Tencent Robotics X Lab. I obtained my Ph.D. degree in Computer Science (Outstanding Graduates of Shanghai) from Fudan University in 2024, advised by Prof.Xiangyang Xue and Prof.Yanwei Fu.
My research interest lies at Robotics and 3D Computer Vision. Specifically, I am very interested in the foundation model for general robotic manipulation.
Actively looking for self-motivated interns to work on related research topics. Please feel free to drop me an email.
Publications
* denotes equal contribution
Hy-Embodied-0.5-VLA: From Vision-Language-Action Models to a Real-World Robot Learning Stack.
Tencent Robotics X & HY Vision Team
Technical Report •
Code •
Model •
Dataset
Technical Report, 2026
 Universal Pose Pretraining for Generalizable Vision-Language-Action Policies
Universal Pose Pretraining for Generalizable Vision-Language-Action Policies
Haitao Lin*, Hanyang Yu*, Jingshun Huang*, He Zhang, Yonggen Ling, Ping Tan, Xiangyang Xue, Yanwei Fu.
RSS, 2026
Webpage •
Paper •
Code
HY-Embodied-0.5: Embodied Foundation Models for Real-World Agents.
Tencent Robotics X & HY Vision Team
Technical Report •
Code
Technical Report, 2026
 Beyond 'Templates': Category-Agnostic Object Pose, Size, and Shape Estimation from a Single View
Beyond 'Templates': Category-Agnostic Object Pose, Size, and Shape Estimation from a Single View
Jinyu Zhang*, Haitao Lin*, Jiashu Hou*, Xiangyang Xue, Yanwei Fu.
Arxiv, 2025
Paper

TAIROS: An Embodied AI Platform for Robotics Applications.
Tencent Robotics X Team & Futian Laboratory Team.
Webpage •
Technical Report
TAIROS Platform, 2025
Yongchong Gu, Haitao Lin, Yanwei Fu.
IROS, 2025
Webpage •
Paper
 🎩CAP-Net: A Unified Network for 6D Pose and Size Estimation of Categorical Articulated Parts from a Single RGB-D Image
🎩CAP-Net: A Unified Network for 6D Pose and Size Estimation of Categorical Articulated Parts from a Single RGB-D Image
Jingshun Huang*, Haitao Lin*, Tianyu Wang, Yanwei Fu, Xiangyang Xue, Yi Zhu.
CVPR, 2025,
Webpage •
Paper •
Code •
Dataset
 You Only Estimate Once: Unified, One-stage, Real-Time Category-level Articulated Object 6D Pose Estimation for Robotic Grasping
You Only Estimate Once: Unified, One-stage, Real-Time Category-level Articulated Object 6D Pose Estimation for Robotic Grasping
Jingshun Huang*, Haitao Lin*, Tianyu Wang, Yanwei Fu, Yu-Gang Jiang, Xiangyang Xue.
ICRA, 2025
Webpage •
Paper
 Polaris: Open-ended Interactive Robotic Manipulation via Syn2Real Visual Grounding and Large Language Models
Polaris: Open-ended Interactive Robotic Manipulation via Syn2Real Visual Grounding and Large Language Models
Tianyu Wang, Haitao Lin, Junqiu Yu, Yanwei Fu.
IROS, 2024
Webpage •
Paper
 LAC-Net: Linear-Fusion Attention-Guided Convolutional Network for Accurate Robotic Grasping Under the Occlusion
LAC-Net: Linear-Fusion Attention-Guided Convolutional Network for Accurate Robotic Grasping Under the Occlusion
Jinyu Zhang*, Yongchong Gu*, Jianxiong Gao, Haitao Lin, Qiang Sun, Xinwei Sun, Xiangyang Xue, Yanwei Fu.
IROS, 2024
Webpage •
Paper •
Code
 PourIt!: Weakly-supervised Liquid Perception from a Single Image for Visual Closed-Loop Robotic Pouring
PourIt!: Weakly-supervised Liquid Perception from a Single Image for Visual Closed-Loop Robotic Pouring
Haitao Lin, Yanwei Fu, Xiangyang Xue.
ICCV, 2023
Webpage •
Paper •
Code •
Dataset
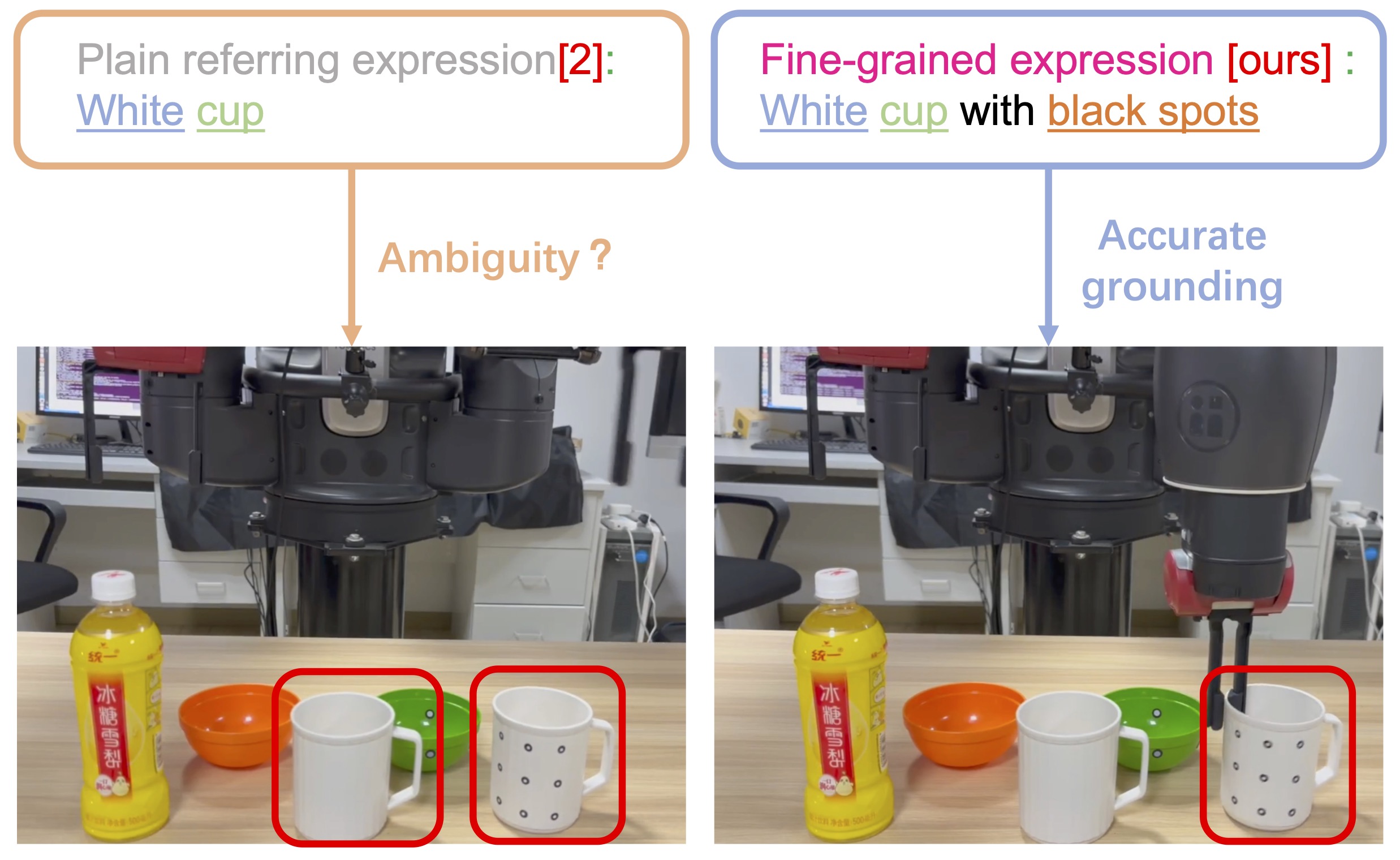 Language Guided Robotic Grasping with Fine-grained Instructions
Language Guided Robotic Grasping with Fine-grained Instructions
Qiang Sun*, Haitao Lin*, Ying Fu, Yanwei Fu, Xiangyang Xue
IROS, 2023
Webpage •
Paper
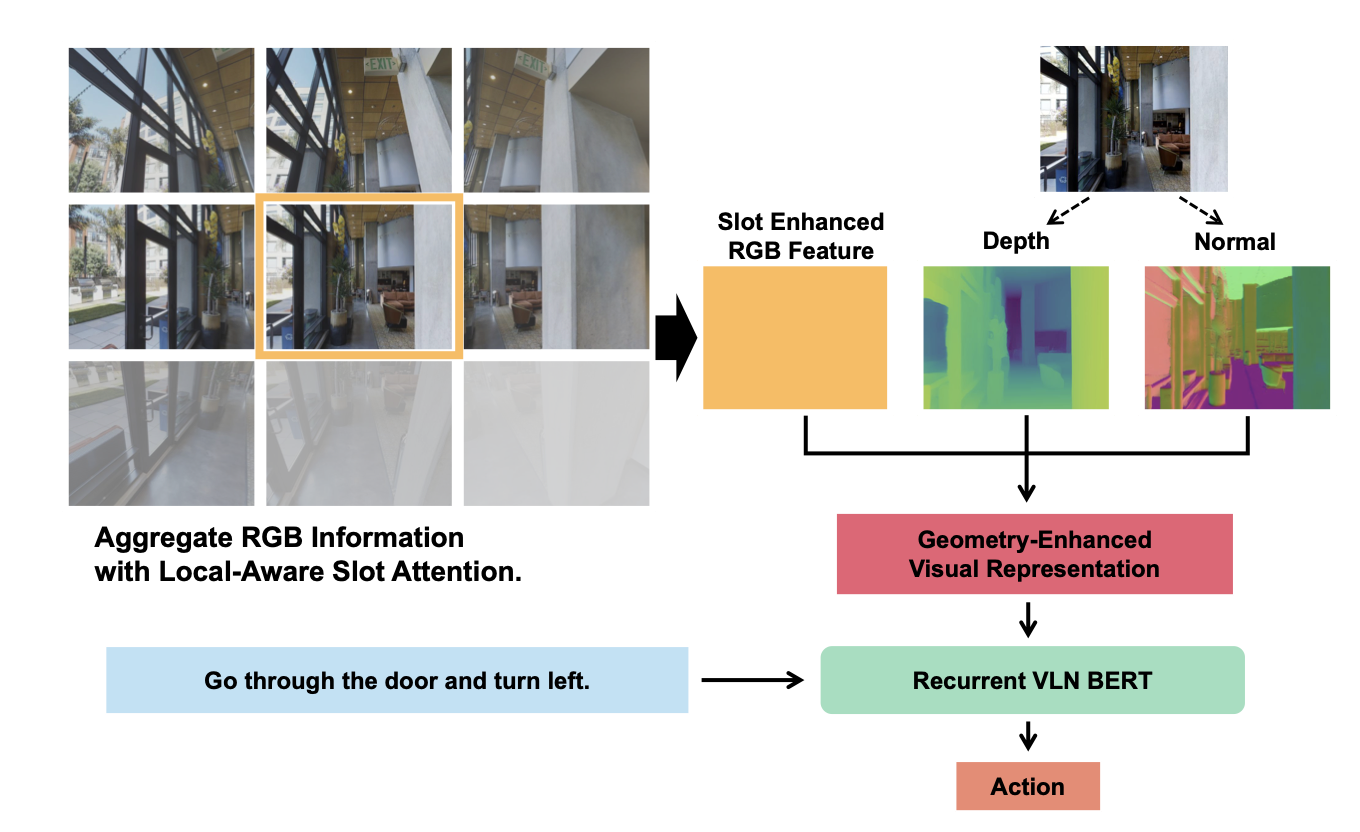 GeoVLN: Learning Geometry-Enhanced Visual Representation with Slot Attention for Vision-and-Language Navigation
GeoVLN: Learning Geometry-Enhanced Visual Representation with Slot Attention for Vision-and-Language Navigation
Jingyang Huo*, Qiang Sun*, Boyan Jiang*, Haitao Lin, Yanwei Fu
CVPR, 2023
Paper
 I Know What You Want: A "Smart Bartender" System by Interactive Gaze Following
I Know What You Want: A "Smart Bartender" System by Interactive Gaze Following
Haitao Lin, Zhida Ge, Xiang Li, Yanwei Fu, and Xiangyang Xue
ICRA, Stand Alone Video, 2023
Demo
 SAR-Net: Shape Alignment and Recovery Network for Category-level 6D Object Pose and Size Estimation
SAR-Net: Shape Alignment and Recovery Network for Category-level 6D Object Pose and Size Estimation
Haitao Lin, Zichang Liu, Chilam Cheang, Yanwei Fu, Guodong Guo, Xiangyang Xue
CVPR, 2022
Webpage •
Paper •
Code
 I Know What You Draw: Learning Grasp Detection Conditioned on a Few Freehand Sketches
I Know What You Draw: Learning Grasp Detection Conditioned on a Few Freehand Sketches
Haitao Lin, Chilam Cheang, Yanwei Fu, Xiangyang Xue
ICRA, 2022
Webpage •
Paper
 Learning 6-DoF Object Poses to Grasp Category-level Objects by Language Instructions
Learning 6-DoF Object Poses to Grasp Category-level Objects by Language Instructions
Chilam Cheang, Haitao Lin, Yanwei Fu, Xiangyang Xue
ICRA, 2022
Webpage •
Paper
 Neural Pose Transfer by Spatially Adaptive Instance Normalization
Neural Pose Transfer by Spatially Adaptive Instance Normalization
Jiashun Wang*, Chao Wen*, Yanwei Fu, Haitao Lin, Tianyun Zou, Xiangyang Xue, Yinda Zhang
CVPR, 2020
Webpage •
Paper •
Code
Internship

Deep Learning Algorithm and Software Group
Computer Vision Algorithm Intern
2023
Projects
Hybrid Visual and Tactile-Guided Nucleic Acid Throat Swab Sampling Robot
The robotic arm is controlled to gently swab the throat with real-time visual and tactile feedback
2022
Robot Pharmacist
The robotic arm is controlled to fetch bottles with the estimated 6-DoF pose
2021
Legged robot on Webots Simulation
Trotting gait planning and attitude control of a legged robot
2019
Indoor Fire Detection by a Quadcopter
Obtain the video stream from DJI Mavic Pro's camera and perform the fire detection algorithm on a mobile phone
2018
DIY Quadcopter
A quadcopter is controlled using optical flow for position and an ultrasonic sensor for altitude
2016 - 2017
DIY Quadcopter
My DIY quadcopter is flying
2015